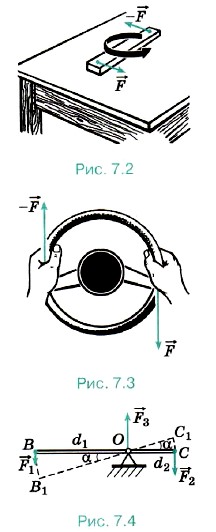
Второе условие равновесия твёрдого тела. Убедимся, что условие (7.2) является необходимым, но недостаточным для равновесия твёрдого тела. Приложим к доске, лежащей на столе, в различных точках две равные по модулю и противоположно направленные силы так, как показано на рисунке 7.2. Сумма этих сил равна нулю:
+ (-) = 0. Но доска тем не менее будет поворачиваться. Точно так же две одинаковые по модулю и противоположно направленные силы поворачивают руль велосипеда или автомобиля (рис. 7.3).
Какое же ещё условие для внешних сил, кроме равенства нулю их суммы, должно выполняться, чтобы твёрдое тело находилось в равновесии? Воспользуемся теоремой об изменении кинетической энергии.
Найдём, например, условие равновесия стержня, шарнирно закреплённого на горизонтальной оси в точке О (рис. 7.4). Это простое устройство, как вам известно из курса физики основной школы, представляет собой рычаг первого рода.
Пусть к рычагу приложены перпендикулярно стержню силы 1 и 2.
Кроме сил 1 и 2, на рычаг действует направленная вертикально вверх сила нормальной реакции 3 со стороны оси рычага. При равновесии рычага сумма всех трёх сил равна нулю: 1 + 2 + 3 = 0.
Вычислим работу, которую совершают внешние силы при повороте рычага на очень малый угол α. Точки приложения сил 1 и 2 пройдут пути s1 = ВВ1 и s2 = CC1 (дуги ВВ1 и СС1 при малых углах α можно считать прямолинейными отрезками). Работа А1 = F1s1 силы 1 положительна, потому что точка В перемещается по направлению действия силы, а работа А2 = -F2s2 силы 2 отрицательна, поскольку точка С движется в сторону, противоположную направлению силы 2. Сила 3 работы не совершает, так как точка её приложения не перемещается.
Пройденные пути s1 и s2 можно выразить через угол поворота рычага а, измеренный в радианах: s1 = α|ВО| и s2 = α|СО|. Учитывая это, перепишем выражения для работы так:
А1 = F1α|BO|, (7.4)
А2 = -F2α|CO|.
Обсудите с одноклассниками примеры, показанные на рисунках 7.2 и 7.3. Рассмотрите силы, действующие на отдельные элементы доски и руля.
Радиусы ВО и СО дуг окружностей, описываемых точками приложения сил 1 и 2, являются перпендикулярами, опущенными из оси вращения на линии действия этих сил
Как вы уже знаете, плечо силы — это кратчайшее расстояние от оси вращения до линии действия силы. Будем обозначать плечо силы буквой d. Тогда |ВО| = d1 — плечо силы 1, а |СО| = d2 — плечо силы 2. При этом выражения (7.4) примут вид
А1 = F1αd1, А2 = -F2αd2. (7.5)
Из формул (7.5) видно, что работа каждой из сил равна произведению момента силы на угол поворота рычага. Следовательно, выражения (7.5) для работы можно переписать в виде
А1 = М1α, А2 = М2 α, (7.6)
а полную работу внешних сил можно выразить формулой
А = А1 + А2 = (М1 + М2)α. α, (7.7)
Так как момент силы 1 положителен и равен М1 = F1d1 (см. рис. 7.4), а момент силы 2 отрицателен и равен М2 = -F2d2, то для работы А можно записать выражение
А = (М1 - |М2|)α.
Когда тело приходит в движение, его кинетическая энергия увеличивается. Для увеличения кинетической энергии внешние силы должны совершать работу, т. е. в этом случае А ≠ 0 и соответственно М1 + М2 ≠ 0.
Если работа внешних сил равна нулю, то кинетическая энергия тела не изменяется (остаётся равной нулю) и тело остаётся неподвижным. Тогда
М1 + М2 = 0. (7.8)
Запомни
Уравнение (7.8) и есть второе условие равновесия твёрдого тела.
Важно
При равновесии твёрдого тела сумма моментов всех внешних сил, действующих на него относительно любой оси, равна нулю.
Итак, в случае произвольного числа внешних сил условия равновесия абсолютно твёрдого тела следующие:
Второе условие равновесия можно вывести из основного уравнения динамики вращательного движения твёрдого тела. Согласно этому уравнению где М — суммарный момент сил, действующих на тело, М = М1 + М2 + М3 + ... , ε — угловое ускорение. Если твёрдое тело неподвижно, то ε = 0, и, следовательно, М = 0. Таким образом, второе условие равновесия имеет вид М = М1 + М2 + М3 + ... = 0.
Если тело не абсолютно твёрдое, то под действием приложенных к нему внешних сил оно может и не оставаться в равновесии, хотя сумма внешних сил и сумма их моментов относительно любой оси равны нулю.
Приложим, например, к концам резинового шнура две силы, равные по модулю и направленные вдоль шнура в противоположные стороны. Под действием этих сил шнур не будет находиться в равновесии (шнур растягивается), хотя сумма внешних сил равна нулю и нулю равна сумма их моментов относительно оси, проходящей через любую точку шнура.
Ключевые слова для поиска информации по теме параграфа. Условия равновесия твёрдого тела
Вопросы к параграфу
1. Вспомните, что называется центром тяжести тела или системы тел.
2. Что называют моментом силы?
3. Какие условия необходимы и достаточны для равновесия твёрдого тела?
Образцы заданий ЕГЭ
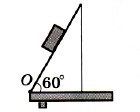
А1. При выполнении лабораторной работы ученик установил наклонную плоскость под углом 60° к поверхности стола. Длина плоскости равна 0,6 м. Момент силы тяжести бруска массой 0,1 кг относительно точки О при прохождении им середины наклонной плоскости равен
1) 0,15 Н • м 2) 0,30 Н • м 3) 0,45 Н м 4) 0,60 Н • м
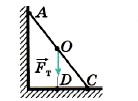
А2. На рисунке схематически изображена лестница АС, опирающаяся на стену. Чему равен момент силы тяжести, действующей на лестницу, относительно точки С?
1) 0 2) Fт • OD 3) Fт • АС 4) Fт • DC
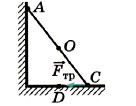
А3. На рисунке схематически изображена лестница АС, опирающаяся на стену. Чему равен момент силы трения, действующей на лестницу, относительно точки D?



 + (-
+ (- Обсудите с одноклассниками примеры, показанные на рисунках 7.2 и 7.3. Рассмотрите силы, действующие на отдельные элементы доски и руля.
Обсудите с одноклассниками примеры, показанные на рисунках 7.2 и 7.3. Рассмотрите силы, действующие на отдельные элементы доски и руля.
 где М — суммарный момент сил, действующих на тело, М = М1 + М2 + М3 + ... , ε — угловое ускорение. Если твёрдое тело неподвижно, то ε = 0, и, следовательно, М = 0. Таким образом, второе условие равновесия имеет вид М = М1 + М2 + М3 + ... = 0.
где М — суммарный момент сил, действующих на тело, М = М1 + М2 + М3 + ... , ε — угловое ускорение. Если твёрдое тело неподвижно, то ε = 0, и, следовательно, М = 0. Таким образом, второе условие равновесия имеет вид М = М1 + М2 + М3 + ... = 0.
 Если тело не абсолютно твёрдое, то под действием приложенных к нему внешних сил оно может и не оставаться в равновесии, хотя сумма внешних сил и сумма их моментов относительно любой оси равны нулю.
Если тело не абсолютно твёрдое, то под действием приложенных к нему внешних сил оно может и не оставаться в равновесии, хотя сумма внешних сил и сумма их моментов относительно любой оси равны нулю.