|
|
|
|
|
Глава 1. Кинематика точки и твёрдого тела
Угловая скоростьКаждая точка тела, вращающегося вокруг неподвижной оси, проходящей через точку О, движется по окружности, и различные точки проходят за время Δt разные пути. Так, АА1 > ВВ1 (рис. 1.62), поэтому модуль скорости точки А больше, чем модуль скорости точки В. Но радиус-векторы, определяющие положение точек А и В, поворачиваются за время Δt на один и тот же угол Δφ.
Угол φ — угол между осью ОХ и радиус-вектором Пусть тело вращается равномерно, т. е. за любые равные промежутки времени радиус-векторы поворачиваются на одинаковые углы. Чем больше угол поворота радиус-вектора, определяющего положение какой-то точки твёрдого тела, за определённый промежуток времени, тем быстрее вращается тело и тем больше его угловая скорость.
Будем обозначать угловую скорость греческой буквой ω (омега). Тогда по определению
Угловая скорость в СИ выражается в радианах в секунду (рад/с). Например, угловая скорость вращения Земли вокруг оси 0,0000727 рад/с, а точильного диска — около 140 рад/с. Угловую скорость можно связать с частотой вращения.
Если тело совершает ν (греческая буква «ню») оборотов за 1 с, то время одного оборота равно 1/ν секунд.
Таким образом, связь между частотой и периодом вращения можно представить в виде
Полному обороту тела соответствует угол Δφ = 2π. Поэтому согласно формуле (1.26)
Если при равномерном вращении угловая скорость известна и в начальный момент времени t0 = 0 угол φ0 = 0, то угол поворота радиус-вектора за время t согласно уравнению (1.26) φ = ωt. Если φ0 ≠ 0, то φ - φ0 = ωt, или φ = φ0 ± ωt.
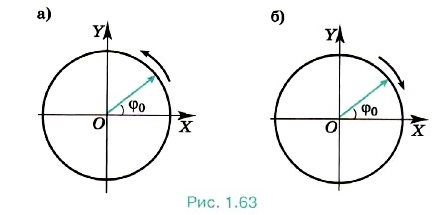
Угловая скорость принимает положительные значения, если угол между радиус-вектором, определяющим положение одной из точек твёрдого тела, и осью ОХ увеличивается (рис. 1.63, а), и отрицательные, когда он уменьшается (рис. 1.63, б).
Тем самым мы можем найти положение точек вращающегося тела в любой момент времени. § 16. Кинематика абсолютно твёрдого тела (продолжение)
|



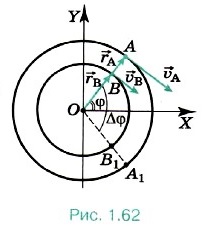
 определяющим положение точки А (см. рис. 1.62).
определяющим положение точки А (см. рис. 1.62).
 Понаблюдайте за движением велосипеда. Сравните угловые скорости педали, какой-либо точки цепи её движении по окружности и колеса.
Понаблюдайте за движением велосипеда. Сравните угловые скорости педали, какой-либо точки цепи её движении по окружности и колеса.


 Радиан равен центральному углу, опирающемуся на дугу, длина которой равна радиусу окружности, 1 рад = 57°17'48". В радианной мере угол равен отношению длины дуги окружности к её радиусу: φ = l/R.
Радиан равен центральному углу, опирающемуся на дугу, длина которой равна радиусу окружности, 1 рад = 57°17'48". В радианной мере угол равен отношению длины дуги окружности к её радиусу: φ = l/R.
|
|