|
|
|
|
|
Глава 4. Механические волны. Звук
§ 4.2. Поперечные волны
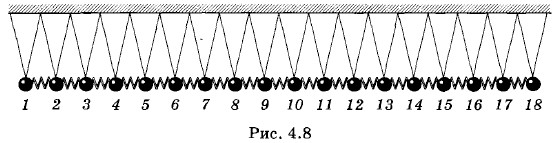
Проще всего иметь дело не с самим резиновым шнуром, а с его упрощенной моделью. Каждый участок шнура обладает массой и упругостью. При деформации шнура в каждом его сечении появляются силы упругости. Вместо реального шнура возьмем цепочку одинаковых металлических шаров, подвешенных на нитях. Шары связаны между собой пружинами (рис. 4.8). Масса пружин много меньше массы шаров. В этой модели инертные (масса) и упругие свойства шнура разделены: масса сосредоточена в основном в шарах, а упругость — в пружинах. Это разделение несущественно при исследовании волнового движения.
Если отклонить левый крайний шар в горизонтальной плоскости, то пружина деформируется, и на шар 2 начнет действовать сила, заставляя его отклоняться в ту же сторону, в которую был отклонен шар 1. Чем больше масса шара, тем медленнее он будет набирать скорость под действием силы. Вследствие этого движение шара 2 не будет происходить согласованно с движением шара 1. Чем больше массы шаров, тем больше шар 2 отстает в своем движении от шара 1. Существенна здесь еще и жесткость пружины. Чем больше жесткость пружины, тем больше сила упругости при данной деформации и, следовательно, шар 2 быстрее будет набирать скорость. Его движение, повторяющее движение шара 1, меньше будет запаздывать по времени. Если шар 1 заставить совершать периодическое движение (просто рукой или с помощью какого-либо механизма, превращающего вращательное движение в колебательное), то шар 2 тоже придет в колебательное движение вслед за шаром 1, но с некоторым отставанием по фазе. Шар 3 под влиянием силы упругости, действующей на него со стороны шара 2, тоже начнет колебаться, еще более отставая по фазе, и т. д. Наконец, все шары станут колебаться с одной и той же частотой, но с различными фазами. При этом вдоль цепочки шаров побежит поперечная волна. Проследим, как она образуется. Пусть, к примеру, цепочка содержит 18 шаров. В начальный момент все они покоятся (рис. 4.9, а). Шар 1 приводится в колебательное движение с периодом Т и амплитудой sm. По истечении времени Если подобным образом проследить далее за распространением колебаний (рис. 4.9, в, г), то можно убедиться в том, что спустя время Т после начала процесса шар 1 окажется опять в положении равновесия, а колебания уже достигнут шара 13 (рис. 4.9, д). После этого начнется второй период колебаний (рис. 4.9, е).
|



 он отклонится от положения равновесия на расстояние sm. При этом он вовлекает в движение шар 2, а шар 2 вовлекает шар 3 и т. д. Когда шар 1 достигает максимального отклонения от положения равновесия, шар 2 его еще не достигнет, а шар 3 сместится от положения равновесия лишь на небольшое расстояние, шар 4 вообще еще не успеет сдвинуться с места (рис. 4.9, б). В момент времени
он отклонится от положения равновесия на расстояние sm. При этом он вовлекает в движение шар 2, а шар 2 вовлекает шар 3 и т. д. Когда шар 1 достигает максимального отклонения от положения равновесия, шар 2 его еще не достигнет, а шар 3 сместится от положения равновесия лишь на небольшое расстояние, шар 4 вообще еще не успеет сдвинуться с места (рис. 4.9, б). В момент времени  он только начнет движение. На рисунке 4.9, б и на всех последующих стрелки у шаров — это векторы скорости движения шаров в соответствующие моменты времени (вид сверху). Конечно, совсем не обязательно, чтобы именно шар 4 начинал свое движение спустя четверть периода. Это может быть и шар 5, и шар 6 или еще более далекий шар. Все зависит от масс шаров и упругости пружин, так как именно они определяют скорость распространения колебаний. Мы лишь условно считаем, что в рассматриваемой модели колебания за время
он только начнет движение. На рисунке 4.9, б и на всех последующих стрелки у шаров — это векторы скорости движения шаров в соответствующие моменты времени (вид сверху). Конечно, совсем не обязательно, чтобы именно шар 4 начинал свое движение спустя четверть периода. Это может быть и шар 5, и шар 6 или еще более далекий шар. Все зависит от масс шаров и упругости пружин, так как именно они определяют скорость распространения колебаний. Мы лишь условно считаем, что в рассматриваемой модели колебания за время 
|
|