|
|
|
|
|
Глава 7. Равновесие абсолютно твёрдых тел
Равновесие тел
Оно является необходимым, но не является достаточным. Итак,
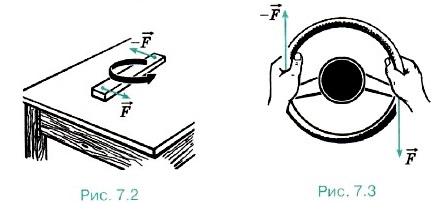
Если сумма внешних сил равна нулю, то равна нулю и сумма проекций этих сил на оси координат. В частности, для проекций внешних сил на ось ОХ можно записать: F1x + F2x + F3x + ... = 0. (7.3) Такие же уравнения можно записать и для проекций сил на оси OY и OZ. Второе условие равновесия твёрдого телаУбедимся, что условие (7.2) является необходимым, но недостаточным для равновесия твёрдого тела. Приложим к доске, лежащей на столе, в различных точках две равные по модулю и противоположно направленные силы так, как показано на рисунке 7.2. Сумма этих сил равна нулю:
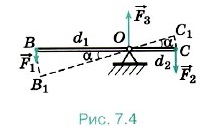
Какое же ещё условие для внешних сил, кроме равенства нулю их суммы, должно выполняться, чтобы твёрдое тело находилось в равновесии? Воспользуемся теоремой об изменении кинетической энергии. Найдём, например, условие равновесия стержня, шарнирно закреплённого на горизонтальной оси в точке О (рис. 7.4). Это простое устройство, как вам известно из курса физики основной школы, представляет собой рычаг первого рода.
Пусть к рычагу приложены перпендикулярно стержню силы Кроме сил Вычислим работу, которую совершают внешние силы при повороте рычага на очень малый угол α. Точки приложения сил Пройденные пути s1 и s2 можно выразить через угол поворота рычага а, измеренный в радианах: s1 = α|ВО| и s2 = α|СО|. Учитывая это, перепишем выражения для работы так: А1 = F1α|BO|, (7.4)
Радиусы ВО и СО дуг окружностей, описываемых точками приложения сил Как вы уже знаете, плечо силы — это кратчайшее расстояние от оси вращения до линии действия силы. Будем обозначать плечо силы буквой d. Тогда |ВО| = d1 — плечо силы А1 = F1αd1, А2 = -F2αd2. (7.5)
|



 + (-
+ (-
 Обсудите с одноклассниками примеры, показанные на рисунках 7.2 и 7.3. Рассмотрите силы, действующие на отдельные элементы доски и руля.
Обсудите с одноклассниками примеры, показанные на рисунках 7.2 и 7.3. Рассмотрите силы, действующие на отдельные элементы доски и руля.
|
|